
Conception et réalisation d'une assistance gestuelle à distance
Préambule :
Le rapport entre la technologie et l’homme est complexe et multi facette. D’une part, la technologie a été développée par l’homme pour améliorer sa vie et rendre les tâches plus faciles et plus efficaces.
La technologie a permis des avancées majeures dans des domaines tels que la médecine, les communications, la production alimentaire et l’énergie.
L’homme augmenté :

L’homme augmenté est une expression qui fait référence à l’utilisation de la technologie pour améliorer les capacités physiques et cognitives de l’être humain au-delà de ses limites naturelles.
Cette idée implique l’usage de différentes technologies, telles que la génétique, la cybernétique, les interfaces cerveau-machine, la robotique, l’intelligence artificielle, l’impression 3D, la réalité augmentée, entre autres, pour améliorer les fonctions corporelles et mentales de l’homme.
Les améliorations corporelles peuvent inclure des prothèses ou des implants pour remplacer ou améliorer les fonctions de certains organes ou membres qui ne remplissent plus leurs fonctions correctement en mettant la vie de l’homme en danger ou même en imposant un inconfort permanent.
Les besoins :
La commande gestuelle à distance permet de contrôler des dispositifs ou des interfaces utilisateur sans avoir à les toucher physiquement, en utilisant des gestes et des mouvements de la main ou du corps. Les besoins de la commande gestuelle à distance peuvent varier en fonction des cas d’utilisation spécifiques.
La commande gestuelle à distance peut offrir une alternative pratique et innovante à l’utilisation de périphériques de commande traditionnels, et peut améliorer l’ergonomie, l’efficacité, l’accessibilité et l’expérience utilisateur pour une large gamme d’applications. Elle permet donc :
v Interaction sans contact
v Amélioration de l’ergonomie
v Augmentation de l’efficacité
v Expérience utilisateur immersive
v Accessibilité améliorée
v Avancées technologiques

Le cahier des charges :
Objectif :
Concevoir une main robotisée commandée à distance gestuellement pour effectuer des tâches à distance, notamment dans des environnements où le contact physique doit être évité.
Spécifications techniques :
La main robotisée doit être équipée :
ü de cinq doigts, chacun étant contrôlé individuellement pour permettre des mouvements précis et des prises variées.
ü d’un système de caméra ou de capteurs pour reconnaître et suivre les mouvements gestuels de l’utilisateur.
ü d’un système de contrôle pour interpréter les mouvements gestuels de l’utilisateur et les traduire en mouvements précis des doigts de la main robotisée.
La main robotisée doit être capable de fonctionner sans fil, avec une portée suffisante pour permettre une utilisation à distance.
Réalisation :
La commande avec un bras robotisé fait référence au processus de contrôle et de manipulation d’un bras robotique à l’aide de commandes spécifiques. Un bras robotisé est un système mécanique composé de plusieurs articulations et de divers degrés de liberté, conçu pour effectuer des tâches physiques ou des manipulations automatisées.
La commande d’un bras robotisé peut se faire de différentes manières, selon les technologies et les systèmes utilisés. Voici quelques-unes des méthodes couramment utilisées pour commander un bras robotisé :
Un groupe d’élèves de la première SI ( Les Sciences de l’Ingénieur ) promotion 2022-2023 a choisi de travailler sur ce projet.
Le groupe est composé de :
§ MOY Elann avec la tâche de programmation et algorithme
§ NATCHAN Benjamin avec la tâche motorisation des articulations
§ ROBERT Demetrio avec la tâche interface de communication
§ MAMODE PREMDJEE Rhemann avec la tâche Transmission des commandes
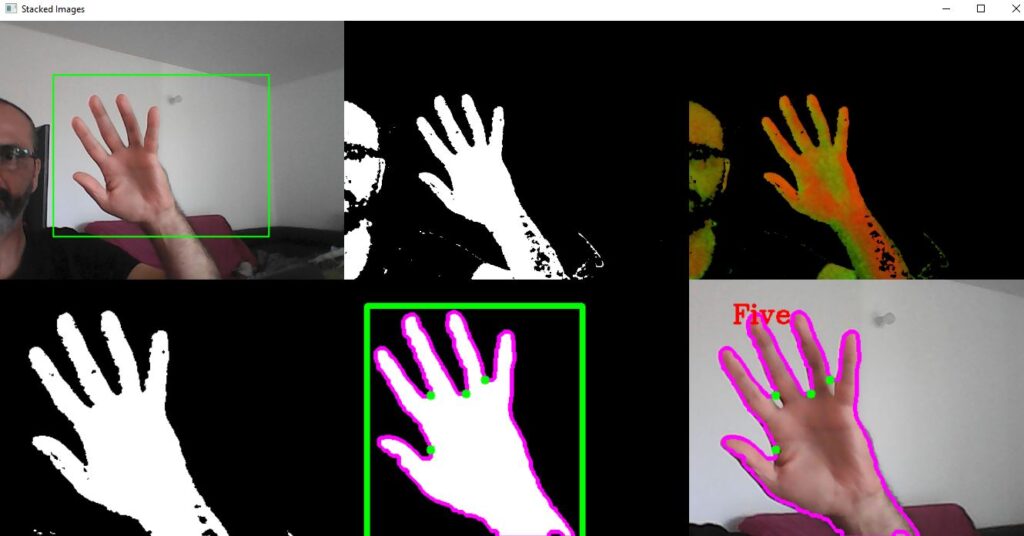
Après une étude des besoins et une profonde réflexion, le groupe a opté pour la commande manuelle avec identification de la main de l’utilisateur en temps réel avec l’option de détection des noms des différents doigts avec un comptage.
Cette approche permet d’obtenir des informations en temps réel sur l’environnement ou sur l’état du bras robotisé, ce qui permet de réaliser une commande plus adaptative et réactive.
Commande manuelle :
Dans ce mode de commande, un opérateur utilise une interface utilisateur pour déplacer manuellement le bras robotisé en temps réel. Le groupe l’a réalisé à l’aide de dispositifs de suivi des mouvements comme il est bien expliqué dans la vidéo ci-dessous dont le montage a été réalisé par MOY Elann.